Oppgradering av gripeverktøy
Prosjektbeskrivelse
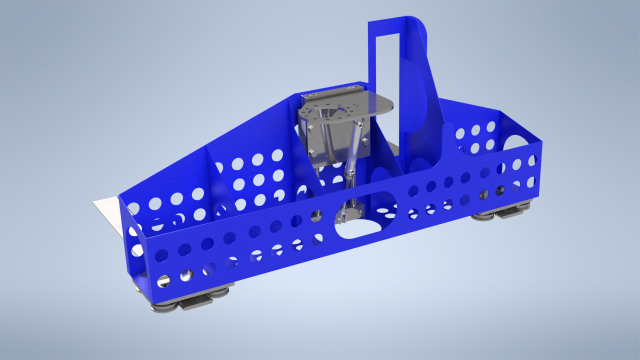
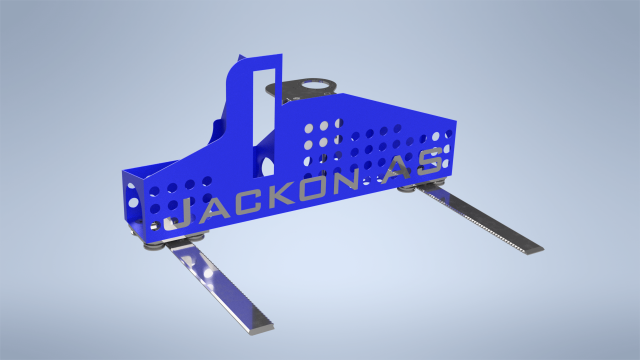
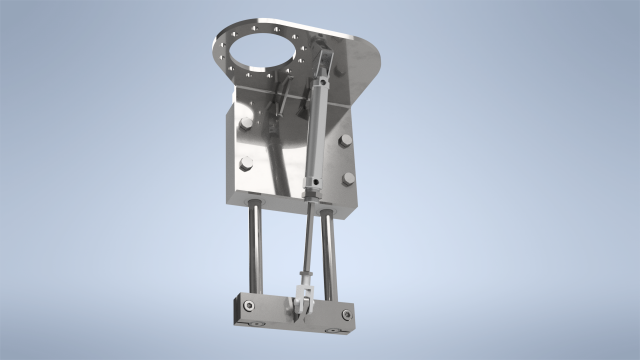
Jackon AS har ytret ønske om en forbedret løsning på gripeverktøyet på roboten som benyttes til stabling av ferdigvarer. Problemstillingen oppstår da roboten skal stable ferdigvarer for palletering. Roboten klarer ikke å kompensere for hyppige høydeavvik, hvilket resulterer i en krasj mellom gripeverktøyet og ferdigvarene.
Slike krasj påfører både ferdigvarene, gripeverktøyet og roboten uønskede belastninger. Dette går ofte utover den strukturelle integriteten til gripeverktøyet. I praksis blir gripeverktøyet påført så store belastninger at rammen gjennomgår en plastisk deformasjon, og må sendes til reparasjon for oppretting.
Effektmålet av dette prosjektet skal kunne måles i redusert nedetid for produksjonslinjen, og økt tilgjengelighet på roboten. Det skal også bli lettere for operatører å skifte ut, eller justere gripeverktøyet ved en eventuell skade.
Prosjektgruppen





Prosjektbilder